Traducción del artículo en https://blog.openstreetmap.org/2018/04/01/tips-pokemon-go-2/.
El artículo a continuación es una versión modificada de un mensaje escrito por Spanholz, con contribuciones de otros miembros de la comunidad OSM, orientado a nuevos mapeadores llegando desde Pokémon GO. Modificado con permiso.
Pokémon GO e Ingress cambiaron sus mapas base a OpenStreetMap en 2017. Muchos de ustedes pueden haber descubierto una perdida de información en el mapa del juego. Sin formas de edificios, sin parques o senderos. Pero tu puedes agregarlos y ayudar a crear un mapa libre del mundo.
¿Que es OpenStreetMap?
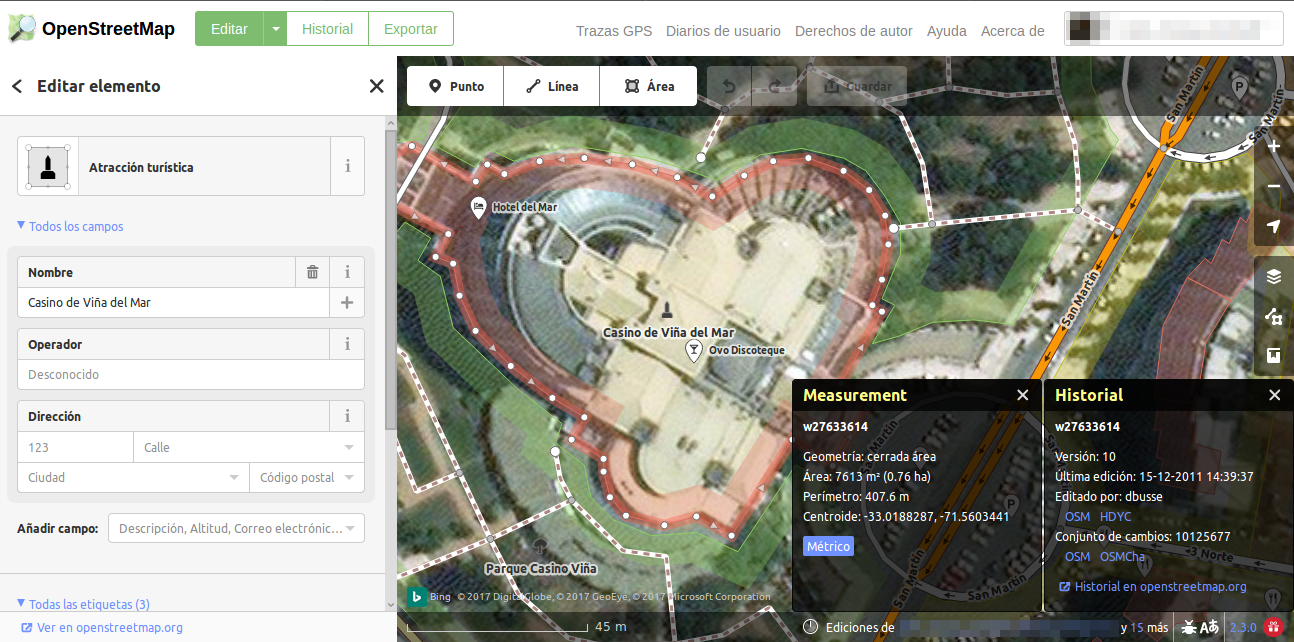
OpenStreetMap (OSM) es un mapa que cualquiera puede editar. Hay algunas similitudes con Wikipedia, pero también hay diferencias (si eres un contribuyente de Wikipedia por favor lee esto). Todo lo que ves en el mundo puede estar en un mapa. Datos abiertos, utilizables por todos. Niantic utiliza datos de OSM para Pokémon GO, los usuarios de Wheelmap enriquecen OpenStreetMap para ayudar a personas con discapacidades y Kurviger puede mostrar rutas para motociclistas que tienen más curvas y están fuera de áreas residenciales. Hay muchos más ejemplos de como los datos que contribuyes son utilizados.
¿Como es distinto a otros mapas en linea?
Los datos de OpenStreetMap son abiertos. Tu tiene permitido imprimir mapas basado en OSM de manera comercial, con la atribución correspondiente en ellos. Tu puedes tomar los datos del mapa y crear tu propio motor de enrutamiento. Puedes crear tu propio estilo de mapa y utilizarlo para visualizar datos de OSM. Nosotros creemos que la información geográfica debiera estar disponible en una gran base de datos para todos.