Traducción del anuncio de Bryan Housel para iD versión 2.6.0:
¡Feliz 2018! Acabo de liberar iD v2.6.0.
📣 Destacados del Lanzamiento
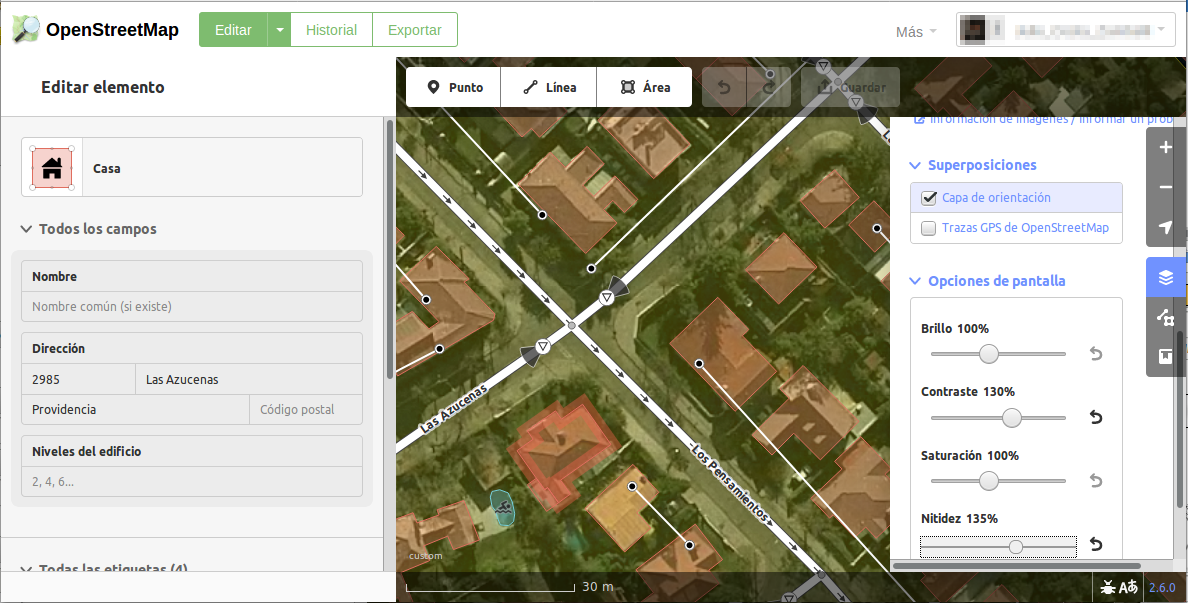
– 🎚 Ahora puedes ajustar el brillo, contraste, saturación y nitidez.
(No disponible actualmente en Internet Explorer o Edge)
Intenta mejorar las imágenes de fondo abriendo el panel de ajuste de fondos (atajo “B”) y ajustando los controles deslizables.
– 🚫 iD ahora prevendrá que los usuarios dibujen muchas lineas y áreas que se auto-intercepten.
Ver el issue https://github.com/openstreetmap/iD/issues/4646 para ejemplos y más información.
Puedes saltarte estos controles sosteniendo presionada la tecla Alt/Option mientras dibujas.
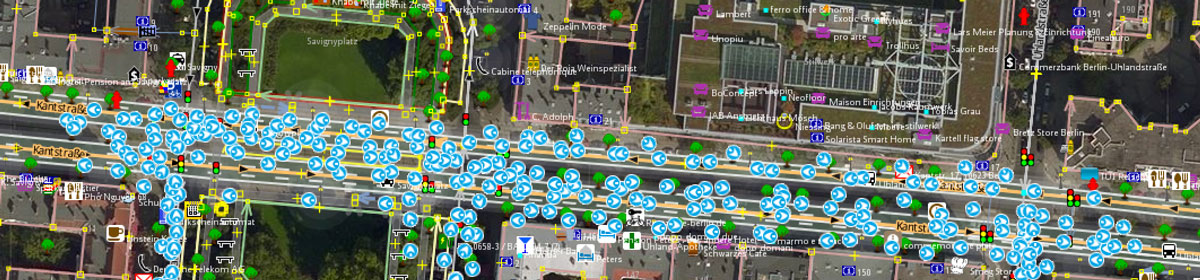
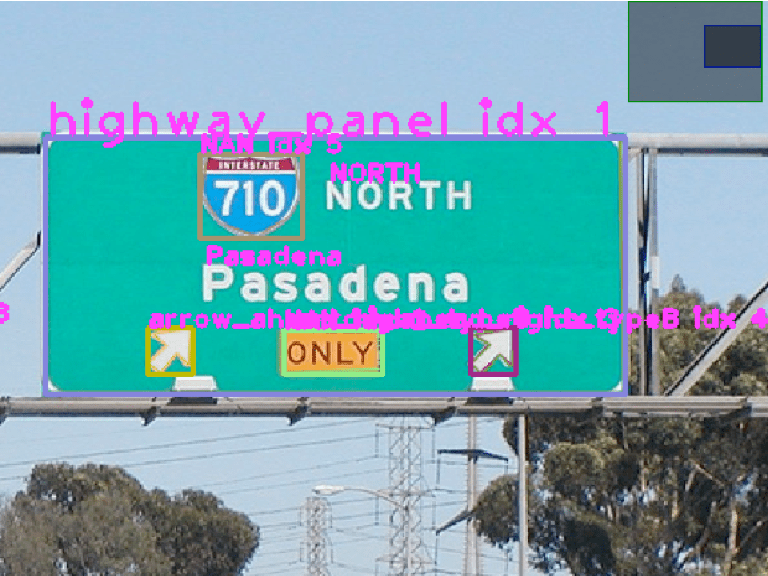
– ↕️ Objetos con una etiqueta tipo dirección desplegarán conos de vista indicando la dirección a la que miran. Esto es útil para mapear características como carteles de calles, señales de transito, cámaras de seguridad y más.
– 🚊 Las recomendaciones relacionadas con transito han sido actualizadas para soportar el esquema de etiquetado de Transporte Público v2.
Muchas recomendaciones tienen también nuevos iconos, para calzar mejor con el medio de transporte (tranvía, tren liviano, troles, etc.)
Intenta mapear algunas plataformas de transito, estaciones, posiciones de parada, etc.
– 📖 Hemos refrescado completamente el contenido de ayuda dentro de la aplicación en iD.
¡Muchas gracias a Manfred Brandl, Minh Nguyễn, y nuestros muchos voluntarios en Transifex por su trabajo en esto!
Revisa los nuevos textos de ayuda abriendo el panel de Ayuda (atajo “H”).
Hay muchas más recomendaciones, mejoras de usabilidad, y arreglos de fallas incluidos también.
Estoy realmente orgulloso del trabajo que hemos sido capaces de entregar en este lanzamiento, y espero que todos puedan ver el registro de cambios.
Cerca de 20 personas contribuyeron con solicitudes pull, muchos de ellas son contribuidoras por primera vez: ¡Gracias! 🙏
Registro de cambios:
https://github.com/openstreetmap/iD/blob/master/CHANGELOG.md#260
Twitter:
v2.6.0, deslizables para imágenes: https://twitter.com/bhousel/status/955146596211150852
Nuevo contenido de Ayuda: https://twitter.com/bhousel/status/955148340857065472
Reddit:
https://www.reddit.com/r/openstreetmap/comments/7s2m3g/id_editor_v260_released_and_available_on/
Como siempre, pueden seguirme en Twitter https://twitter.com/bhousel para las últimas noticias sobre iD. ¡2018 será un gran año!
¡Gracias!
❤️ Bryan y el resto del equipo 🆔.