Traducción de una columna publicada por Philipp Kandal en OpenStreetMap@Telenav:
Las herramientas para la construcción de mapas digitales hoy no se ven nada como las que teníamos hace solo una década. Impulsado por una mezcla de la energía y la pasión del movimiento de bases combinado con innovaciones en tecnología, hemos visto una rápida evolución marcada por tres puntos de inflexión: el surgimiento del GPS de uso particular, la disponibilidad de imágenes aéreas de alta resolución en grandes volúmenes, y últimamente un giro a herramientas de construcción de mapas a gran escala potenciado por Inteligencia Artificial (IA) en el que nos encontramos hoy.
Para OpenStreetMap (OSM), la disponibilidad de equipos GPS de uso particular precisos y a precios asequibles fue un facilitador clave en 2004, cuando Steve Coast y una comunidad emergente de pioneros (¡literalmente!) dieron vueltas en bicicletas, capturaron trazas GPS, y crearon la primera versión del mapa utilizando instrumental rudimentario.
La amplia disponibilidad de imágenes satelitales y aéreas, actualizadas y de alta resolución se convirtió en el siguiente disruptor de la construcción de mapas alrededor de 2009-2010. Empoderó a personas alrededor del mundo para contribuir al mapa, no solo en lugares que conocían, sino que en cualquier parte del mundo donde hubiera imágenes disponibles. Esto llevó al rápido crecimiento de mapeadores alrededor del mundo y a la expansión adicional de un mapa global, ayudando a notables esfuerzos humanitarios, como la enorme respuestas de mapeo inmediatamente después del terremoto de Haití en 2010.
Adelantemos hasta el día de hoy, y nos encontramos otra vez en la mitad de un cambio masivo en la forma de hacer mapas, esta vez alimentado por la ubicuidad de sensores, inteligencia artificial (IA), y el aprendizaje de maquinas o machine learning (ML). El combo de tres aristas de la disponibilidad de frameworks de software maduros, una floreciente comunidad de desarrolladores e investigadores, y hardware basado en GPU “comoditizado” permiten una ola sin precedentes de tecnología potenciada por IA tanto para consumidores como para negocios.
No tomó mucho para que la comunidad constructora de mapas abrazara este poder y empezara a aplicarlo a imágenes aéreas y a nivel de calle para automatizar la generación de cambios observados al mapa. Cuando son dirigidos a la comunidad de mapeadores humanos, estos resultados reduciran, sin lugar a dudas, el esfuerzo para crear y mejorar mapas por un factor de 10.
En Telenav, nos hemos embarcado tempranamente en esta tendencia construyendo y haciendo crecer OpenStreetCam así como lo han hecho otros con un interés en OSM, como Facebook.
Sin embargo, un elemento importante, ha estado frenando una adopción y perfeccionamiento más rápido de generación de mapas basada en machine learning: la falta de apertura en el espacio. Por varias razones, tanto datos como software han sido mantenidos mayoritariamente en silos y no han sido abiertos a contribuciones de la comunidad. Desde nuestra perspectiva, crear un ecosistema abierto, alrededor de nuevas tecnologías de construcciones de mapas es vital – apertura y creatividad son lo que hizo a OSM un éxito en primer lugar, porque los mapeadores pueden capturar lo que les importa profundamente.
Estamos convencidos de que un ecosistema abierto alrededor del machine-learning para la construcción de mapas es la única manera de asegurar que esta tecnología pueda ser adoptada por la comunidad. Para ese fin, Telenav está abriendo tres componentes clave del stack de OpenStreetCam:
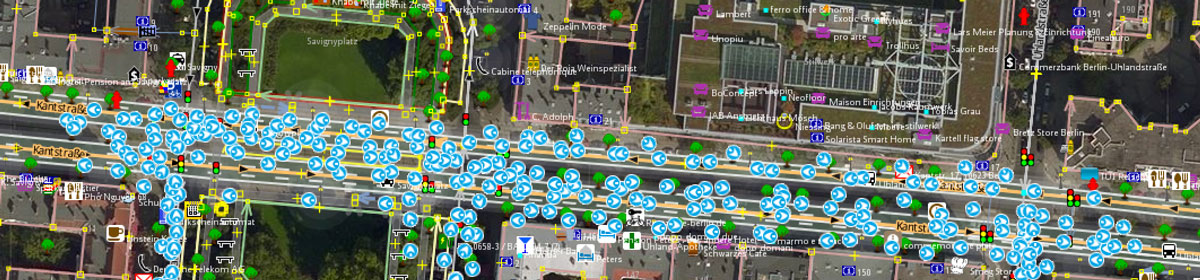
Un conjunto de imágenes de entrenamiento. Hemos invertido más de cinco años-hombre creando un conjunto de imágenes a nivel de calle de entrenamiento orientadas a señales de transito comunes. El conjunto consiste en más de 50.000 imágenes, que estarán disponibles para cualquiera bajo una licencia CC-BY-SA. Continuaremos anotando manualmente imágenes para doblar el tamaño de este conjunto para finales de 2018, en ese momento será el conjunto de imágenes realmente abiertas más grande.
Tecnologia de machine-learning central. Actualmente, nuestro stack detecta más de 20 tipo de diferentes de señales y semaforos. Continuaremos desarrollando el sistema para agregar caracteristicas importantes para los casos de navegación y conducción, como marcas de caminos incluyendo pistas.
Resultados de detecciones. Finalmente, liberaremos todos los resultados de correr el stack en las más de 140 millones de imágenes a nivel de calle que ya están en OpenStreetCam a la comunidad OSM como una capa para mejorar el mapa.
Puedes encontrar todo lo que he mencionada anteriormente en el repositorio de Telenav.AI en Github.
Nuestra esperanza es que el abrir nuestro stack y datos permitirá a otros mejorar tanto el conjunto de entrenamiento así como las redes de detección y ponerlas en nuevos y creativos usos que llenen las necesidades y deseos de los diversas comunidades de constructores y consumidores de mapas.
Adicionalmente, al licenciar abiertamente los datos y el software, queremos asegurarnos de que la siguiente era de construcción de mapas con OSM permanezca abierta y asequible para todos y fomente la creación de una nueva generación de mapeadores.
Para celebrar este hito y para empoderar a la comunidad para que ejecute sus propias mejoras a este stack en hardware adecuado, que de otra manera es prohibitivamente costoso, estamos lanzando una competencia en torno a nuestros datos de entrenamiento y stack de software, orientada a mejorar la calidad de las detecciones.
El ganador podrá ejecutar sus detecciones en nuestra infraestructura en la nube contra la más de 140 millones de imágenes actualmente en OpenStreetCam, y por supuesto liberar el stack de detección mejorado para que todos los mapeadores puedan mejorar OSM. (¡¡¡¡Oh, y hay USD$10,000 de premio también!!!!)
En largo plazo, liberaremos más partes del stack de tecnologías para construcción de mapas que estamos desarrollando para facilitar aun más el crecimiento y expansión de OSM, y con la idea de que este juegue, con el tiempo, un rol central en potenciar la conducción autónoma.
¡Así es que manténganse sintonizados para más de Telenav!