Traducción de una noticia publicada en el blog de Richard Weait.
Un programa para edición de OpenStreetMap favorito desde hace mucho tiempo es Potlatch2. El desarrollador líder y mantenedor, Richard Fairhurst ha anunciado recientemente dos nuevas funcionalidades para Potlatch2. Veamoslas.
Lee los anuncios de Richard Fairhurst:
Soporte para el indice de imágenes del editor, y otros cambios para simplificar tareas de edición.
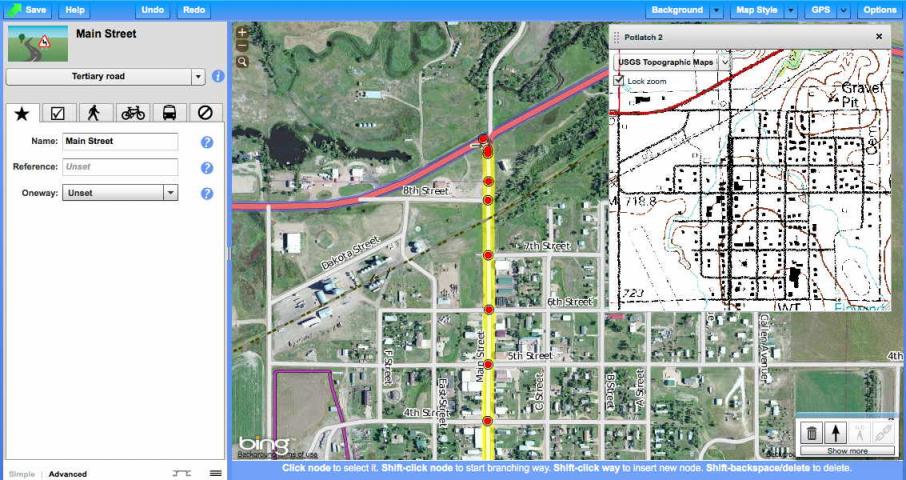
Imágenes duales, permite la referencia a dos fuentes de imagenes distintas al mismo tiempo.
Tutoriales de Potlatch
Si es que no has utilizado Potlatch2 antes debieras darle probarlo. Hay tutoriales para el Potlatch original y un tutorial con un vídeo para Potlatch2.
¿Quizás es tiempo de empezar a publicar más tutoriales para Potlatch2?
Carreras de Codificación y fin de semanas de hackeo
Richard dice que codificó la mayoría de esto en un London OpenStreetMap Hack Weekend el año pasado. Eso es solo un ejemplo más de los beneficios de llevar a cabo eventos de desarrolladores de OpenStreetMap periódicos. Londres aun parece ser el líder global con fin de semanas de hackeo unas dos veces al año.
Créditos
Muchas gracias a Richard Fairhurst por sus muchas contribuciones a OpenStreetMap desde casi el principio de los tiempos (de OSM).
Imagen de pantallazo de Potlatch2 está licenciada CC-By-SA v2, por Richard Fairhurst.


